
Software

As part of the Drones for Foraging project we have been developing custom prototype software for navigation, photo documentation, and in-flight object detection. This software is built upon the Parrot SDK and OpenCV.
Specifically, we are developing two functionalities. The first is in-flight object detection. In the current implementation, the software is capable of distinguishing a red circle as a stand in for an apple or other piece of fruit. The color detection can simply be changed to green if searching for green apples. Future iterations of the software should allow for greater specificity of shape, for example to discern an apple or a berry on a tree or bush. Unlike other imaging tools, this software analyzes the video feed from the drone in-real time, from within the navigation app. This provides the potential for in-field scene analysis.
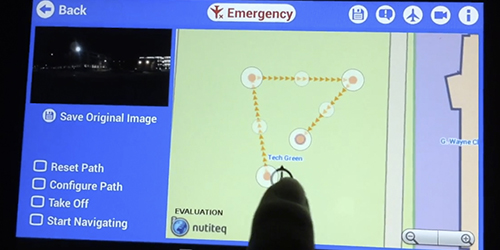
The second functionality we are developing is a custom flight app with the ability to set waypoints and request photos to be taken at those waypoints. This adds significantly to the functionality of the current flight app and provides a feature useful for foraging: the ability to set, save, and repeat flights combined with location specific documentation to aid in multi-site monitoring. The photos can be exported and later processed using desktop imaging tools. Waypoints are set in the interface tapping on a map and can be simply repositioned by dragging the points to any location on the map.
The code is documented and available on Github at: https://github.com/happykarl/ForagingTech/blob/master/README.md